Een humanoïde robot van de nieuwste generatie is drie dagen lang getest in het universitair ziekenhuis van Tsukuba, in Japan, voor logistieke ondersteunende taken. Dit illustreert de eerste pogingen om deze technologieën in de ziekenhuisprocessen te integreren. Het experiment, dat plaatsvond van 23 tot 25 maart 2026, maakt deel uit van een bredere discussie over het personeelstekort.
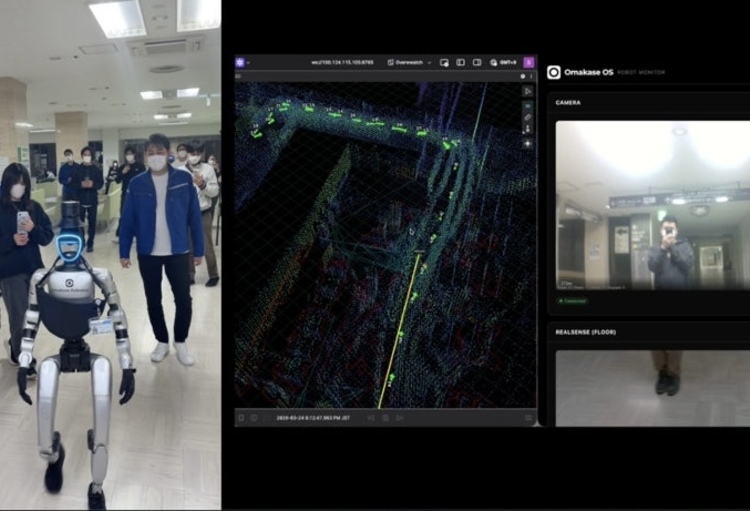
De gebruikte robot, een Unitree G1 ontwikkeld door het Chinese bedrijf Unitree Robotics en uitgerust met het “Omakase OS”-systeem van het Japanse artificiële-intelligentiebedrijf ZEALS, werd getest op verschillende niet-klinische functies: zelfstandig lopen, obstakels ontwijken, spraakgestuurde navigatie en het vervoeren van voorwerpen. Omakase OS is een artificiële-intelligentielaag die de robot in staat stelt zijn omgeving te begrijpen en met mensen te communiceren. Volgens de organisatoren zijn alle doelstellingen die voor deze demonstratie waren vastgesteld, bereikt.
Gerichte indirecte taken
Het experiment vond plaats in de hal van het ziekenhuis, buiten de spreekuren, om het gedrag van de robot in een echte omgeving te testen. De tests waren met name gericht op het vermogen om zich naar specifieke bestemmingen te verplaatsen, zoals de bloedafnamekamer, of om met gebruikers te communiceren.
Het project richt zich expliciet op de indirecte taken die op de teams drukken. Het bedrijf ZEALS benadrukt dat “naast gespecialiseerde klinische taken, zorgprofessionals belast zijn met indirecte taken zoals het toezicht op de faciliteiten, het begeleiden van patiënten en de logistiek”. Deze activiteiten vormen “een aanzienlijke fysieke en tijdsbelasting voor het personeel, met name tijdens nachtdiensten”.
In deze context achten de partners het noodzakelijk om technologische oplossingen in te zetten om “zorgprofessionals in staat te stellen zich te concentreren op mensgerichte zorg”.
Eerste positieve reacties
Ondanks enkele kleine technische incidenten, waaronder een tijdelijke storing in het audiosysteem, heeft de robot alle geplande taken uitgevoerd. De ziekenhuisteams waren lovend over de soepele interacties en bewegingen.
De directeur van het universitair ziekenhuis van Tsukuba, dr. Yuji Hiramatsu, zegt “het concrete potentieel van humanoïde robots om een rol te spelen in de gezondheidszorg” te hebben waargenomen. Hij zegt “onder de indruk te zijn van de vloeiende bewegingen en de dialoog van de robot” en geeft aan dat de instelling “de mogelijkheid van een daadwerkelijke inzet binnen een termijn van één tot twee jaar” overweegt.
Vanuit de industrie benadrukt Masahiro Shimizu, CEO van ZEALS, de noodzaak van aangepaste software: “Hoewel de hardware van humanoïde robots snel evolueert, is de hardware op zichzelf slechts een ‘grote op afstand bestuurbare auto’.” Volgens hem vormt “Omakase OS” de “ziel” van de robot, waardoor deze als een collega in menselijke omgevingen kan functioneren.
Afzonderlijke klinische experimenten, nog in een verkennende fase
De Unitree G1-robot is ook het onderwerp geweest van experimenteel onderzoek in quasi-klinische contexten, los van de logistieke demonstraties die in Japan zijn uitgevoerd. Een studie uitgevoerd door de University of California San Diego heeft een op afstand bediende G1 geëvalueerd op zeven soorten medische handelingen, waaronder lichamelijk onderzoek, spoedinterventies en beeldgeleide procedures. De auteurs beschrijven een eerste poging om humanoïde robots te integreren in de klinische werkprocessen van ziekenhuizen, maar wijzen tegelijkertijd op belangrijke beperkingen met betrekking tot de krachtregeling en de gevoeligheid van de sensoren.
In dit kader werd de robot met name gebruikt voor handelingen zoals auscultatie, beademing met een masker of geleide injecties, met wisselende prestaties en een volledige afhankelijkheid van menselijke afstandsbediening.
Meer recentelijk rapporteert een in 2026 gepubliceerd artikel (arXiv:2602.24156, 2026) een proof of concept in de chirurgie, waarbij een op afstand bediende Unitree G1-humanoïde robot werd gebruikt om de endoscopische visualisatie te handhaven tijdens een sphenoïdectomie op een kadaver. De auteurs geven aan dat tot op heden nog geen enkele humanoïde robot een chirurg heeft bijgestaan tijdens een daadwerkelijke ingreep, wat bevestigt dat deze benaderingen nog in een verkennende fase verkeren.
Een nog verkennende fase
Dit onderzoek illustreert de kloof tussen logistieke demonstraties en klinisch gebruik. Het bevestigt de huidige beperkingen van humanoïde robots bij fijne handelingen in contact met de patiënt, een fenomeen dat in de robotica bekend staat als de paradox van Moravec, volgens welke de voor de mens eenvoudigste taken tot de moeilijkst te automatiseren behoren.
Tegen de achtergrond van een tekort aan ziekenhuispersoneel en dalende kosten van humanoïde platforms worden deze technologieën vooral overwogen voor indirecte taken. De integratie ervan zal afhangen van hun vermogen om aan deze organisatorische behoeften te voldoen.